
FlySpy - ein 2.4GHz Scanner im Selberbau
- 1. 2.4GHz Scanner im Selbstbau
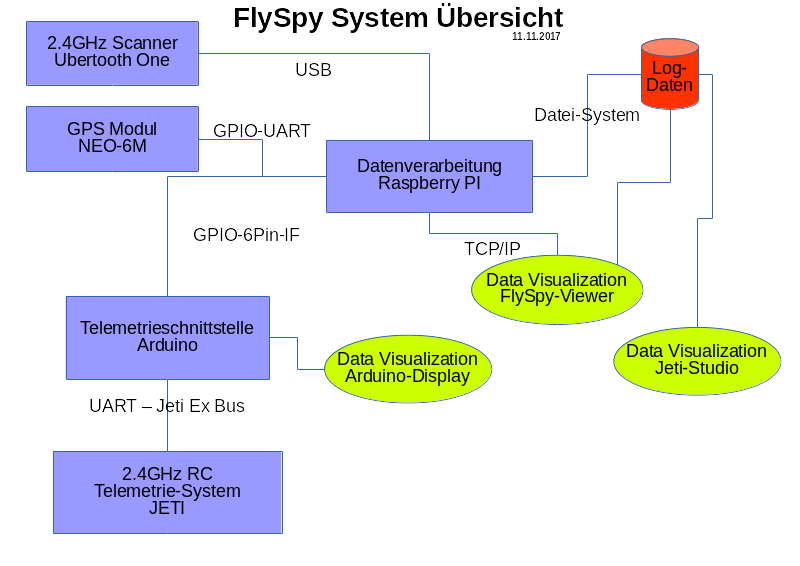
- 1.1. System Architektur
- 1.2. 2.4GHz Scanner
- 1.3. GPS-Modul
- 1.4. Datenverarbeitung
- 1.5. Persistente Daten
- 1.6. Daten Visualisierung
- 1.7. Telemetrieschnittstelle
- 1.8. Telemtrie-System
1. 2.4GHz Scanner im Selbstbau
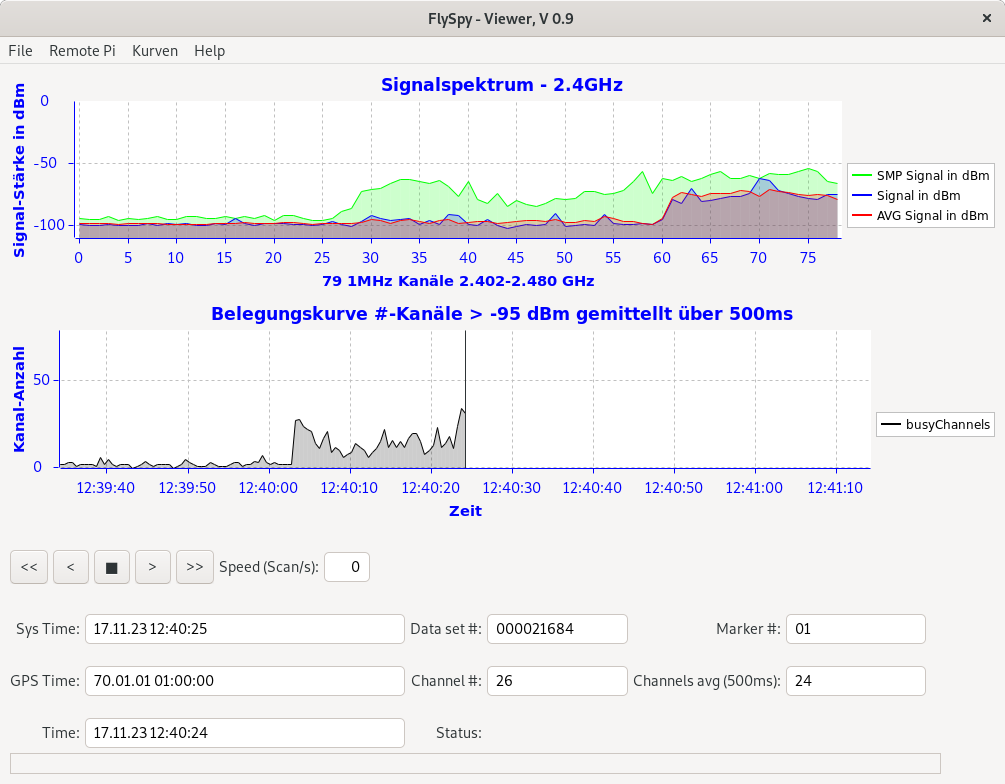
Die Analyse der Übertragungsstrecke von Funksystemen im 2.4GHz Bereich ist schwierig. Alle üblichen Fernsteuersysteme im 2.4GHz Bereich senden mit max. Leistung von 100mW und springen je nach Hersteller unvorhersehbar im Freqeunzereich von 2400 - 2483,5MHz. Alles Sender müssen sich an die komplexe Vorgabe der Norm [ETSI EN 300 328] halten. Hier haben sich bestimmte Verfahren etabliert, um eine zuverlässige Weitwirkung zu haben (RC-Modellflug) und die Norm trotzdem einzuhalten. So darf man mit hoher Leistung (100mW) nur senden, wenn die Bandbreite gering ist (1MHz) und dies auch zeitlich begrenzt ist. So hat sich ein Frequenzhopping-Verfahren, bei dem über den Frequenzbereich gesprungen wird. Der Sendevorgang auf einer Frequenz dauert nur sehr kurze Zeit und liegt im ms-Bereich. Danach wird nach einem pseudo-random-Verfahren ein anderer 1MHz Kanal benutzt.Der hier vorgestellte 2.4GHz Scanner, kann 79 1MHz Kanäle von 2,402 GHz bis 2,480 GHz zu überwachen, allerdings nur mit einer Sampling-Rate von 66 S/s, also alle 15ms. Um eine qualitative Beurteilung des 2.4GHz vorzunehmen, sollte dies jedoch keine große Einschränkung bedeuten.
Hier ein Beispiel für eine Situation mit 2 x WLAN auf unterschiedlichen Kanälen:
Da auf dem Markt zu erschwinglichen Preisen kein Gerät erhältlich ist, das Eigenschaften hat, die eine sinnvolle Nutzung gewährleistet, wurde von den Autoren entschieden einen 2.4GHz Scanner zu entwickeln, der folgende Eigenschaften haben sollte:
- detaillierte spektrale Messung des kompletten genutzten 2.4GHz Bandes
- visuelle Aufbereitung zur Interpretation der Daten offline
- mobile Nutzung möglich
- zusätliche Aufzeichnung von GEO Daten, zur genauen Auswertung
- Open Source Soft- und Hardware
- Option: Schnittstelle zu Telemetriesystem zur Anzeige von Daten des Spektrums auf dem Sender
- Option: visuelle Aufbereitung der Daten am Online-System
1.2. 2.4GHz Scanner
/2.4GHz Scanner - Ubertooth One : ist in der Lage im Monitoring-Mode 79 1MHz Kanäle von 2,402 GHz bis 2,480 GHz zu überwachen1.3. GPS-Modul
/GPS-Modul - NEO-6M : Positions- und Zeitbestimmung zur besseren Auswertbarkeit der Daten bei mobiler Anwendung1.4. Datenverarbeitung
Datenverarbeitung - Raspberry Pi : die Daten des Scanner, des GPS-Moduls, die Scan-Daten speichern und aufgearbeitet wieder zur Verfügung stellen1.5. Persistente Daten
/Log-Daten : zur Auswertung der Messergebnisse werden alle primär- und sekundär-Daten in Dateien gespeichert, die dann per USB Stick übertragen werden können1.6. Daten Visualisierung
/Daten Visualisierung : Visualisierung der Daten ist zur Beurteilung des Zustandes des Frequenzbandes extrem wichtig, um qualitative Aussagen über mögliche Störungen zu treffen1.7. Telemetrieschnittstelle
/Telemetrieschnittstelle - Arduino : liest die die FlySpy-Daten und schickt diese an die Telemetrieschnittstelle eines RC-Empfängers1.8. Telemtrie-System
/2.4GHz RC Telemtrie-System - JETI : diese Option ermöglicht den Einbau des Systems in ein Flugmodell und erlaubt die Überwachung des akutellen Messwerte
2. ToDo List
- Erweiterung des Skriptes convertLog2CSV.sh, so dass neben der gemittelten Anzahl belegter Kanäle und GPS Koordinaten auch noch die GPS altidue/speed/climb/time als Werte im JETI-Studio zur Verfügung stehen.
Links
- http://www.etsi.org/deliver/etsi_en/300300_300399/300328/01.09.01_60/en_300328v010901p.pdf
- http://www.emcsociety.org/wp/wp-content/uploads/2012/11/ESTI-ISM-Band-Standards-Update-IEEE.pdf
- http://www.elektroniknet.de/elektronik/kommunikation/neue-vorschriften-fuer-2-4-ghz-funkkomponenten-111846.html