
Bau eines RC-Servo-Steuer und Messsensors zur Messung von EWD und Ruderauschlägen
Hier wird ein Selbstbau-Projekt zum Bau eines Ruderweg-Mess-Sensors beschrieben, mit folgenden Zielen:
- paralaxenfehlerfreies Vermessen von Ruderwegen bei Modellflugzeugen
- Genauigkeit besser als 0.5mm an der Endleiste des Ruders, bei normalen Rudertiefen (20mm-80mm)
- Tara und Möglichkeit einer Min-/Max-Messung. Nach einmaligem Tara, werden alle Wege in Bezug auf diese Nulllage gemessen und angezeigt.
- schnelles Vermessen pro Ruder für Flugphasen
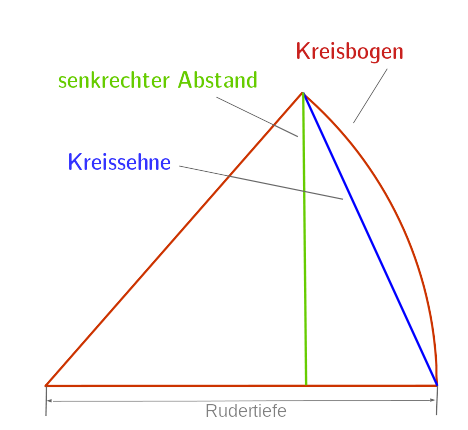
- Messmethoden für: Kreisbogen, Kreissehne, senkrecher Abstand
- Anstatt eines Displays wird das Smartphone oder ein Rechner benutzt
- An-/Steuern eines RC-Servos und Bedienung am Rechner/Tablet/Smartphone (Browser)
- Anzeige der Servo-Parameter in µs und Prozent, mit der Möglichkeit die hersteller-spezifischen Unterschiede der Prozentanzeige/-nutzung konfigurierbar zu machen.
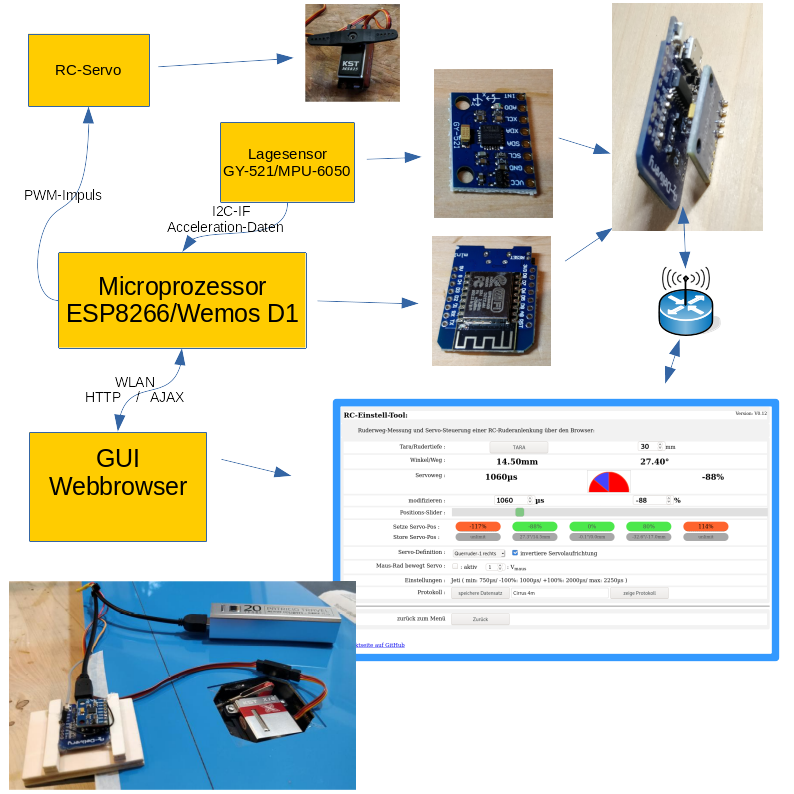
Architektur-Übersicht
Das RC Einstell Tool kann einen Servo mittels PWM Pulserzeugung steuern und die Ansteuerdaten anzeigen. Zusätzlich kann mittels eines Winkelsensors der Ruderausschlag sehr genau vermessen werden (besser als 0.5mm bei üblichen Rudertiefen). Die Benutzeroberfläches ist als Web-Oberfläche ausgelegt, was eine Bedienung auch mit dem Smartphone zulässt. Eine einfache kleine Power-Bank dient als Stromversorgung und man kann extrem einfach und schnell auf der Werkbank beim Bau oder bei Endeinstellarbeiten alle wichtigen Daten schnell, genau und vollkommen reproduzierbar ablesen. Hiermit lassen sich Einstellarbeiten auf der Werkbank oder am aufgebauten Modell sehr professionell, schnell, genau und reproduzierbar durchführen. Dieses Projekt ist die Zusammenführung von https://github.com/Pulsar07/RuderwegMessSensor und https://github.com/Pulsar07/ServoController
Funktionsbeschreibung und Anleitung
Inbetriebnahme
- Stromversorgung
- Der Sensor / das Mikroprozessorboard ist mit einem Micro-USB-Anschluss ausgestattet, hier kann man jedes handelsübliche USB-Netzteil anschließen oder besser jede normale Powerbank. Damit ist man in der Werkstatt oder auf dem Flugfeld mobil ausgestattet.
- WiFi
- Der Sensor muss zuerst mit Smartphone oder PC verbunden werden. Dazu stellt der Sensor per WiFi einen Accesspoint mit der SSID "UHU" und Kennwort "12345678" zur Verfügung. Ist das Gerät mit diesem WLAN verbunden, kann im Web-Browser über die Adresse http://192.168.4.1 die Benutzeroberfläche benutzt und der Sensor konfiguriert werden. Sowohl obige SSID als auch das Kennwort können danach geändert werden.
- Auf der Einstellseite kann eine SSID und ein Kennwort für ein WLAN (WLAN-Client) konfiguriert werden, mit dem sich der Sensor verbinden. Dabei wird dem Sensor eine IP-Adresse zugewiesen, die am WLAN-Router abgefragt werden muss. Änderungen der WLAN Einstellungen müssen gespeichert werden und werden erst nach Neustart aktiv.
- Ist die Verbindung zu einem WLAN konfiguriert (WLAN-Client), kann auf der Einstellungsseite, der Accesspoint deaktiviert werden (nach Speichern und Neustart). Kann beim Neustart keine Verbindung zum konfigurierten WLAN aufgebaut werden, wird der Accesspoint-Mode aber trotzdem aktiviert, damit ein Zugang zum Gerät möglich ist.
- Sensorboard GY-521 mit MPU-6050
- Genauigkeit: Der MEMS Chip des MPU-6050 sollte Winkelauflösungen besser als 0.5° bei 45° Ausschlag messen können, was bei einer 60mm Rudertiefe von 60mm einen Fehler von kleiner als 0.5mm ergibt.
- Kalibrierung: Damit der MPU-6050 allerdings diese Genauigkeit erreicht, muss er nachträglich kalibriert werden. Die Software unterstützt diese Funktion und kann die Werte intern speichern. Zur Kalibrierung muss die GY-521-Sensorplatine mit der flachen Rückseite möglichst exakt horizontal aufgelegt werden. Dann den Kalibrier-Button drücken und ca. 5s warten bis die Kalibrierung beendet ist. Dabei sollte die Auflagefläche (Tisch) nicht bewegt werden und frei von Vibrationen sein.
- Einbaulage: Die Sensorplatine sollte auch genau so, wie bei der Kalibrierung, betrieben werden. Also die flache Seite nach unten und die Seite mit den Elektronikbausteinen nach oben. Nur so wird die oben genannte Genauigkeit erreicht.
- Achsen und Anzeige-Genauigkeit: Auf der Konfigurationsseite, kann die Bezugs-Achse der Winkelmessung, je nach Einbaulage in der Klemmeinrichtung ausgewählt werden. Zudem sind diverse Anzeigegenauigkeiten für die Winkel und die Ruderwegs-Messung auswählbar. Die Anzeige hat zwar immer auf 2 Dezimalstellen, aber intern wird dann gerundet.
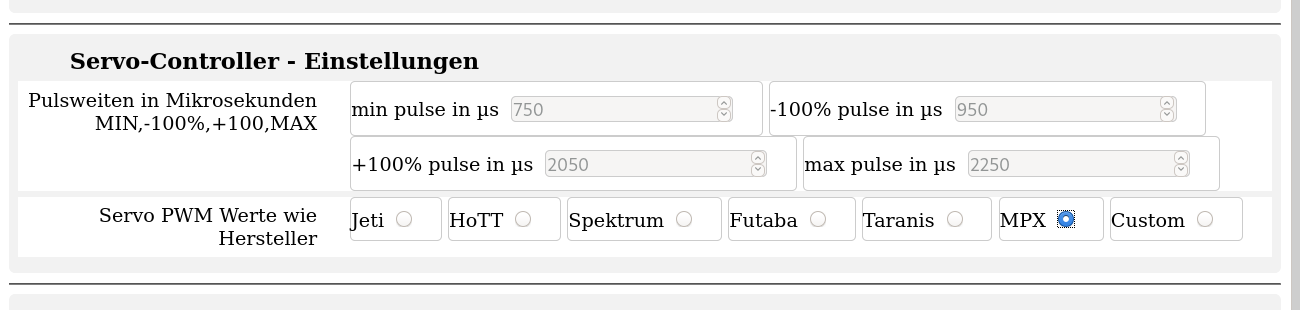
- Für die Ansteuerung des Servos, werden Servowege in Prozent angezeigt. Diese Prozentanzeige wird jedoch bei jedem Hersteller anders implementiert. Auch die Maximalwege sind bei den diversen Herstellern unterschiedlich. Deshalb kann man in den Einstellungen, einen der vorkonfigurierten Hersteller mit den dazugehörigen Werten auswählen (Jeti, HoTT, Spektrum, Futaba, Taranis, MPX oder über Custom Werte vorgeben, die noch nicht durch die vorigen Systeme abgebildet sind.
Winkel-/Ruderweg-Messung
- Der mit dem Mikrokontroller verbundene Messsensor sollte mit einer Klemmvorrichtung fest verbunden sein, und kann dann einfach an eine beliebige Stelle des Ruders aufgeklemmt werden. Die Ruderdrehachse, sollte möglichst parallel zur ausgewählten Dreh-Achse (X- oder Y-Achse) sein. Wie schon beschrieben, muss der Sensor mit dem Gesicht nach oben auf dem Ruder befestigt sein.
- Einschränkungen: Der Sensor kann nur Winkel in Bezug auf die Schwerkraft messen. Somit sind Ruderwegsmessungen für das Seitenruder nur möglich wenn der Rumpf um 90° gedreht liegt.
- Der Ruderweg ist abhänig von der Rudertiefe. Diese ist an der Stelle zu Messen, an der man den Ruderweg messen will. In der Web-Oberfläche des Sensor kann diese Rudertiefe eingegeben werden.
- Ist der Sensor so auf dem Ruder angebracht, und die Rudertiefe eingestellt, ist die Ruderstellung in die Null-Lage zu bringen. Jetzt können Winkel und Ruderweg per "Tara"-Button auf 0 gesetzt werden.
- Bewegt man das Ruder nun nach oben oder unten werden die Ausschläge in Grad und Millimeter angezeigt. Sollte das Vorzeichen nicht den Erwartungen entsprechen, kann dies bei den Einstellungen angepasst werden.
- Zur Flugphasenmessung kann die Min-/Max-Rudermessung benutzt werden. Hier sollte man das Ruder in die Neutralstellung der Flugphase bringen. Nun den Schalter für die Min-/Max-Ruderweg-Messung aktivieren. Damit wird der aktuelle Ruderausschlag als Neutralwert übernommen. Jetzt können die beiden Min-/Max-Werte angefahren werden. Alle drei Werte werden bis zur Deaktiverung der Messung angezeigt.
Servo-Steuerung / Servo-Controller
Die Bedienung am Web-GUI ist denkbar einfach. Die Servo-Position kann über zwei Eingabefelder prozentual oder als Impulsbreite gesteuert werden. Zusätzlich kann die Servoposition über ein Slider-Widget gesteuert werden. Zudem erlaubt eine aktivierbare Maus-Wheel Funktion, mit Beschleunigungsfaktor, das Steuern des Servowegs mittels der Maus. Es sind für diverse Aufgaben noch 3 vordefinierte und einstellbare (Save) Positions-Buttons verfügbar. Die Limit-Buttons, können zum Begrenzen des Servo-Wegs benutzt werden, um ein versehntliches Überfahren eines mechanischen Limits zu verhindern.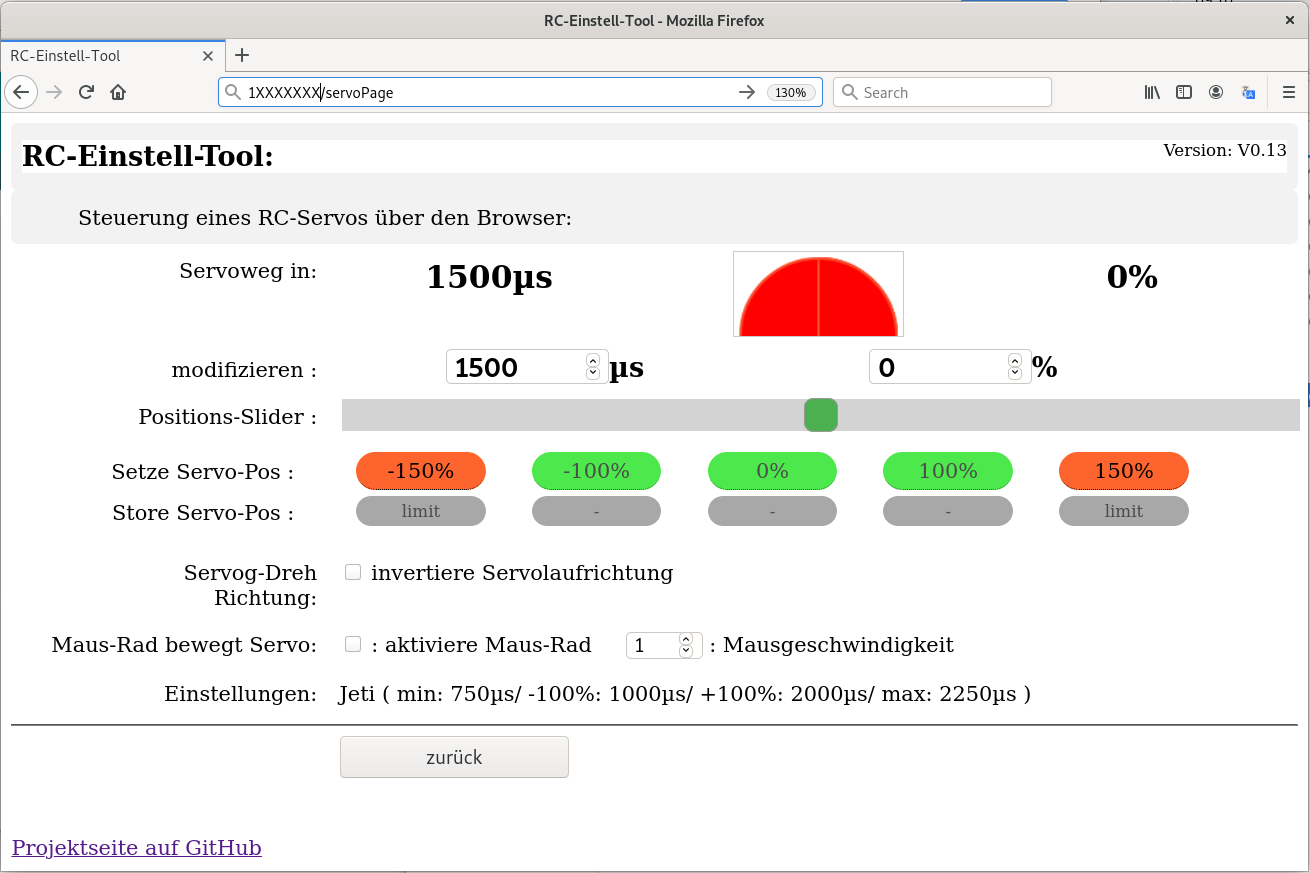
Damit die angezeigten prozentualen Werte exakt mit denen der RC-Systeme übereinstimmen, müssen die Servo-Impulsbreiten auf der Einstellseite exakt eingestellt werden. Für folgende Hersteller sind leidiglich das richtige vordefinierten Settings auszuwählen. Für RC-Systeme anderer Herstellen kann auf der Einstellseite "Custom" gewählt werden und die Servo-Impulsbreiten manuell eingetragen werden.
Die benutzten Servo-Impulsbreiten (in µs) für die verschiedenen prozentualen und Max-/Min-Werte der unterschiedlichen Hersteller sind hier dargestellt:
| Hersteller | Maximum | +100% | 0% | -100% | Minimum |
| Jeti | 2250 | 2000 | 1500 | 1000 | 750 |
| Futaba | 2150 | 2080 | 1520 | 960 | 920 |
| HoTT/Spektrum | 2100 | 1900 | 1500 | 1100 | 900 |
| Taranis | 2268 | 2012 | 1500 | 988 | 732 |
| Multiplex | 2250 | 2050 | 1500 | 950 | 750 |
Aber aufgepasst: Nicht alle Servos unterstützen die extremen Min-/Max-Werte auch.
Steuern und Messen
In dieser Ansicht kann sowohl der Servo gesteurt als auch der Winkel-Sensor abgelesen werden. Dies ist vor allem bei Servo- und Gestänge-Einbauten ein große Hilfe.
Man kann die Werte für einzelne Servos/Ruder messen und die Werte speichern und als Protokoll anzeigen:
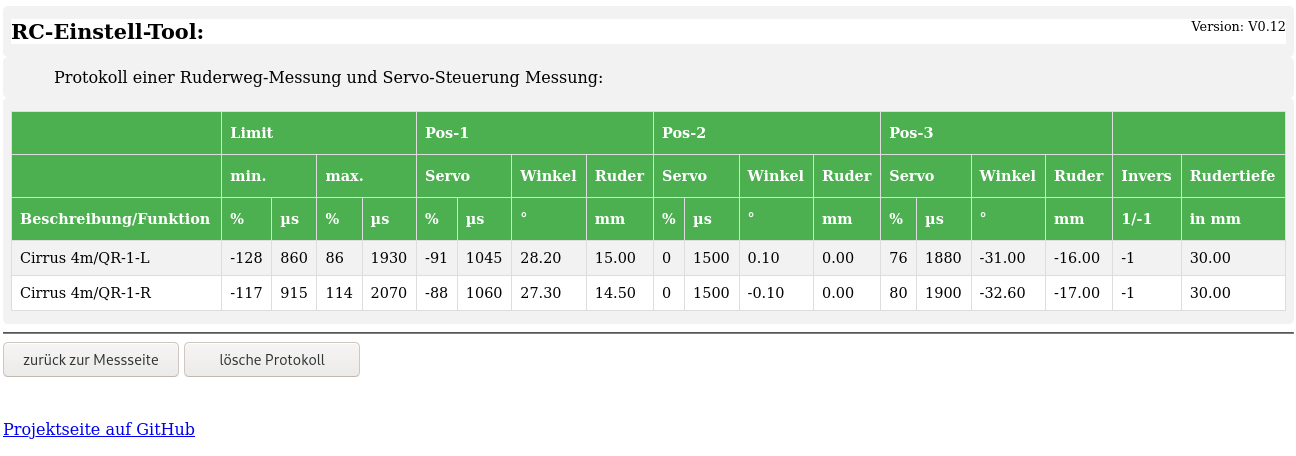
Die Werte bleiben so lange erhalten, wie der Strom angeschlossen bleibt. Zur längeren Speicherung sollte die Protokollseite als HTML-Datei gespeichert werden. Die Werte können dann zur Programmierung des Modellspeichers direkt in den Sender eingegeben werden.
Details:
- Sollte die geänderten WiFi-Daten nicht mehr verfügbar sein, kann der Pin "D5" des Wemos D1 mit einem Kabel beim Einschalten auf Ground gezogen werden. Dabei werden alle Einstellungen auf Default zurückgesetzt und gespeichert. Danach sollte eine Verbindung zum AccessPoint wie oben beschrieben wieder möglich sein.
- Die Messmethode zur Bestimmung des Ruderwegs ist auswählbar. Hier die Unterschiedlichen Strecken. Der Unterschied ist bei kleinen Winkeln und kleinen Rudern vernachlässigbar.
Hardware
Messsensor
Als Messsensor wird der GY-521/MPU-6050 benutzt. Die Genauigkeit liegt nach Kalibrierung bei Winkeln bis +/- 45° kleiner als 0.5°. Der Baustein MPU-6050 wird von einer wirklich sehr gut gemachten Libs von J.Rowberg unterstützt (siehe Link)Die rohen Messwerte des MPU-6050 rauschen ca. 0.015g, was einem Winkel von 1.35° entspricht. Das würde bei einer 50mm Rudertiefe einem Rauschen von 1.2mm entsprechen, was natürlich zu schlecht wäre. Durch eine hohe Abtastrate des Sensors (>500/s) und einem Tiefpass-Filter kann ein Rauschen von ca. 0.05° erreicht werden, was bei einer 50mm Rudertiefe einem Rauschen von 0.04mm entspricht.
Wichtig ist jedoch die Kalibrierung jedes einzelnen Sensors, da jeder anders ist (Produktionsungenauigkeiten des MEMS-Chips), damit die Messgenauigkeit auch im Bereich der genutzten Winkel (+-45°) gut genug ist. Siehe hierzu weiter oben das Kapitel "Inbetriebnahme".
Hier ein paar Links:
- https://www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Datasheet1.pdf
- https://www.az-delivery.de/products/gy-521-6-achsen-gyroskop-und-beschleunigungssensor
- https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
Mikrokontroller
Als Mikrokontroller wird der Wemos D1/ESP8266 benutzt, der ausreichende Rechenpower und Speicherresourcen bietet und eine WLAN Schnittstelle hat. Auch dieser Mikrokontroller hat super gemachte Bibliotheken, zur Nutzung der WiFi-Schnittstelle und zur Programmierung des Web-Servers.Hier ein paar Links:
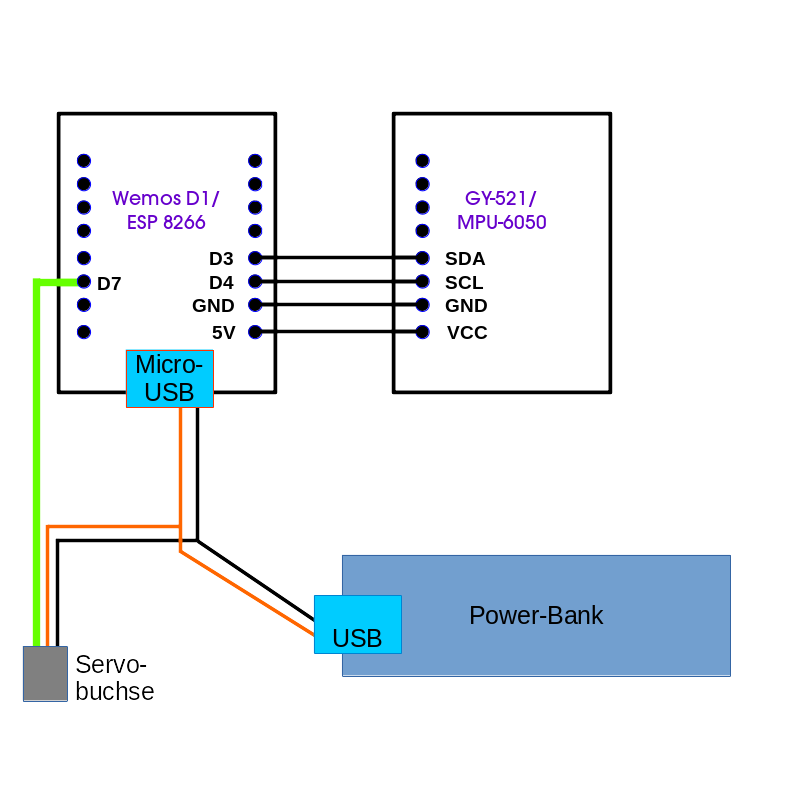
Schaltplan:
Der Schaltplan ist denkbar einfach. Es werden nur 4 Verbindungen zwischen Sensorplatine und Mikrokontroller benötigt. Das Layout und die Software sind so ausgelegt, dass mit einer Stiftleiste 4x1 das Sensorboard mit dem Gesicht in Richtung Mikrokontroller direkt verlötet werden kann. Der Servo wird lediglich mittels eines Signal-Kabels auf den D7 Pin des Microcontrollers verbunden. Die Plus- und Ground-Verbindung wird mittels eines auftrennten und wieder zusammengefügten USB-MicroUSB Kabels hergestellt. Die Servo Stromversorgung wird einfach mittels eines Servo-Buchsenkabels erstellt und sollte nicht über den Microkontroller erfolgen, da die Stromstärke zu hoch für diesen ist.
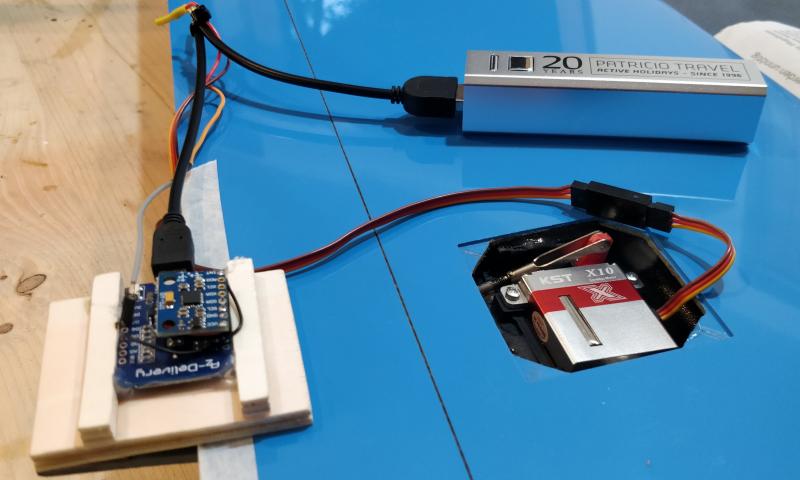
Klemmvorrichtung / Gehäuse:
Hier kann der geneigte Modellbauer die Kombination aus Microprozessor und Sensor in eine geeignete Klemmvorrichtung [ein-]bauen, die ein rutschfestes Klemmen am Ruder gewährleistet. So sieht der Prototyp des Authors aus:
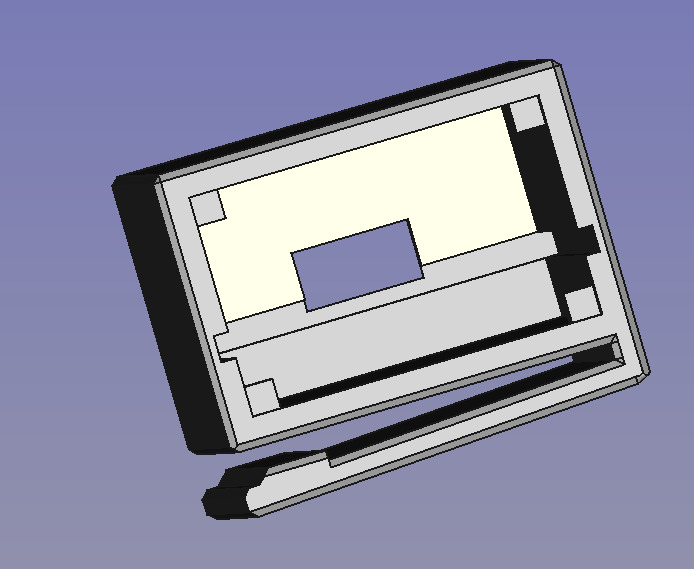
Oder wer Zugang zu einem 3D-Drucker hat, kann ein Gehäuse zur einfachen Klemmung an einem Ruder erstellen. Der STL-File liegt auch im github-Repository:
Software
Die Software liegt unter der "GNU General Public License v3.0" bei GitHub für jeden frei zur Verfügung:Feedback, Fragen oder Fehlermeldung bitte als [Issue] in GitHub
Build
Zum Bau einfach obigen Code als ZIP File herunterladen auspacken und in ein Verzeichnis des Arudino-IDEs legen. Zusätzlich werden folgende Libraries (Infos zum Handling von Libraries im Arduino-IDE unter https://docs.arduino.cc/software/ide-v1/tutorials/installing-libraries) benötigt:- https://github.com/adafruit/Adafruit_Sensor
- https://github.com/Pulsar07/Adafruit_MMA8451_Library
- https://github.com/jrowberg/i2cdevlib
Flashen des Wemos D1 ohne Build
Für Leute die nicht so entwicklerlastig sind, gibt es hier fertige Builds, die man nur noch auf den Wemos D1 flashen muss.
- Version V0.162: upload:RcSetupTool.ino_V0.162.bin.zip
Wie das Flashen mit oder ohne Arduino IDE funktioniert, kann per WEB-Search mit den Schlagworten "esp8266 upload bin" leicht gefunden werden. Als ein Beispiel sei hier nur [NodeMCU Programmer] (exe-Files unter Win32/Win64) angedeutet.